·上一文章:奧迪A6L轎車無法入檔
·下一文章:玉米收獲機過橋主傳動軸斷軸原因失效分析
第三節(jié) 室內(nèi)機單元電路
海信KFR-26GW/11BP室內(nèi)機主板單元電路和海信KFR-2601GW/BP相比,輸入部分的過零檢測電路、傳感器電路及輸出部分的指示燈電路有比較大的差別,本節(jié)作重點介紹;而其他單元電路基本相同,本節(jié)只是簡單介紹其工作原理,相關(guān)知識參見第3章內(nèi)容,相同之處不再一一贅述。
另外,遙控器兩者通用,工作原理也相同,本節(jié)不再敘述,相關(guān)知識參見第3章第6節(jié)內(nèi)容。
一、室內(nèi)機單元電路方框圖
圖5-20所示為室內(nèi)機主板單元電路方框圖,圖中左側(cè)為輸入部分電路,右側(cè)為輸出部分電路。

二、輸入部分電路
1.應急開關(guān)電路
圖5-21(a)所示為海信KFR 26GW/11BP應急開關(guān)電路原理圖,圖5-21(b)所示為實物圖。

該電路的作用是無遙控器可以開啟和關(guān)閉空調(diào)器。CPU11腳為應急開關(guān)信號輸入引腳,正常即應急開關(guān)未按下時為高電平直流5V;在無遙控器需要開啟或關(guān)閉空調(diào)器時,按下應急開關(guān)的按鍵,11腳為低電平0V、CPU根據(jù)低電平時間長短進入各種控制程序。
該電路的關(guān)鍵元器件、常見故障等相關(guān)知識參見第3章第3節(jié)的第一部分內(nèi)容。
2.遙控信號接收電路
圖5-22(a)所示為海信KFR-26GW/ 11 BP遙控信號接收電路原理圖,圖5-22(b)所示為實物圖。
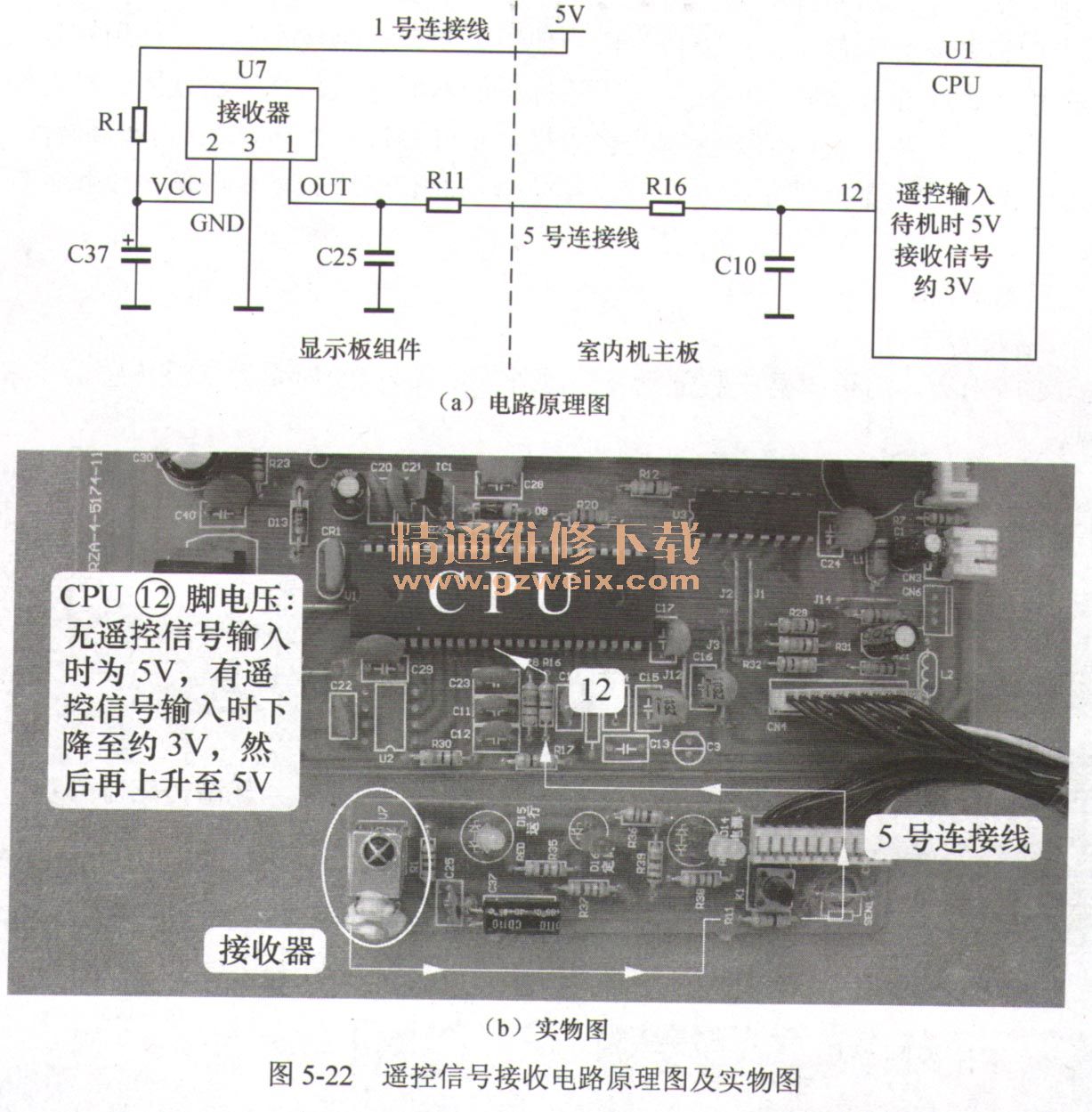
(1)工作原理
該電路的作用是處理遙控器發(fā)送的信號并送至CPU相關(guān)引腳。遙控器發(fā)射含有經(jīng)過編碼的調(diào)制信號,以38kHz為載波頻率發(fā)送至接收器,接收器將光信號轉(zhuǎn)換為電信號,并進行放大、濾波、整形,經(jīng)電阻R11及R16送至CPU12腳,CPU內(nèi)部電路解碼后得出遙控器的按鍵信息,從而對電路進行控制;CPU每接收到遙控信號后會控制蜂鳴器響一聲給予提示。
該電路的關(guān)鍵元器件、測量接收器方法、常見故障等相關(guān)知識參見第3章第3節(jié)的第二部分內(nèi)容。
(2)早期和目前的接收器在出廠時的不同之處
圖5-23所示為早期和目前空調(diào)器中的接收器的引腳區(qū)別。
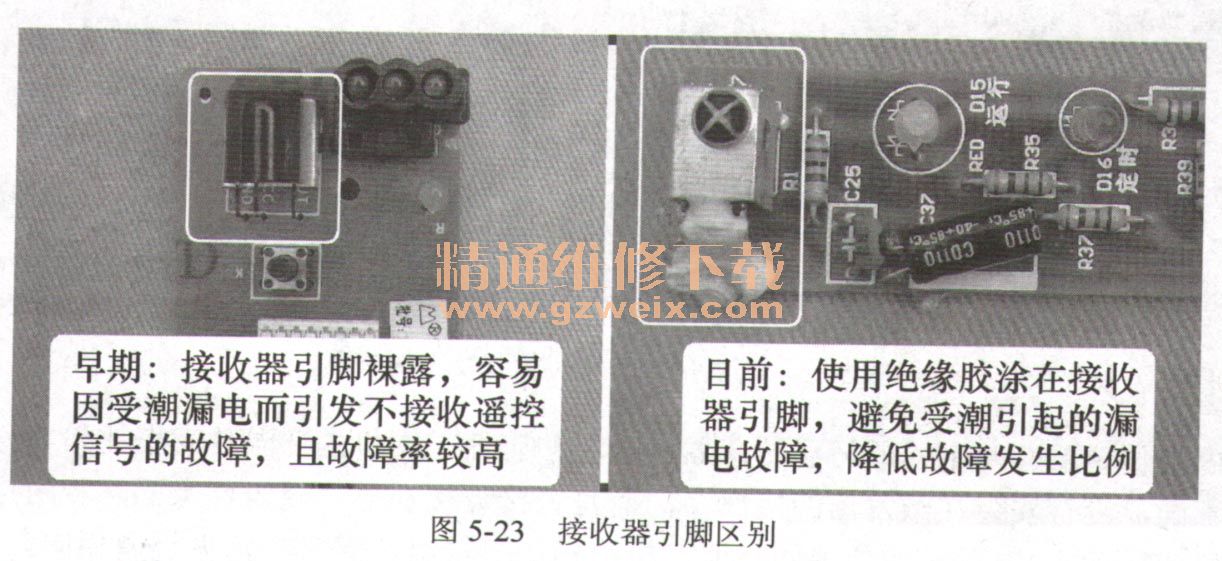
早期大多數(shù)品牌空調(diào)器室內(nèi)機顯示板組件上的接收器引腳裸露在外,容易因受潮引起接收器漏電,出現(xiàn)不能接收遙控信號的故障,并且這是一種通病,無論是變頻空調(diào)器或定頻空調(diào)器,在絕大部分空調(diào)器品牌中均會出現(xiàn)。
實際上門檢修時,一般不用更換接收器,使用電吹風加熱接收器,或使用螺絲刀輕輕敲擊接收器表面,即可排除故障。但這是一種治標不治本的方法,空調(diào)器使用一段時間之后還會再次出現(xiàn)相同的故障,根治的方法就是在更換質(zhì)量好的接收器后,在引腳表面涂上一層絕緣膠。目前出廠的大多數(shù)品牌空調(diào)器,接收器引腳均涂有絕緣膠,以降低不接收遙控信號故障的比例。
3.傳感器電路
(1)安裝位置
圖5-24所示為環(huán)溫傳感器安裝位置及實物外觀,圖5-25所示為管溫傳感器安裝位置及實物外觀。


室內(nèi)機傳感器有兩個,即環(huán)溫傳感器和管溫傳感器。本機的環(huán)溫傳感器比較特殊,與常見機型不同,沒有安裝在蒸發(fā)器的進風面,而是直接焊接在顯示板組件上面(相對應主板沒有環(huán)溫傳感器插座),且實物外觀同普通二極管相似;管溫傳感器與常見機型相同。
(2)工作原理
圖5-26所示為海信KFR-26GW/11BP傳感器電路原理圖,圖5-27所示為管溫傳感器信號流程。

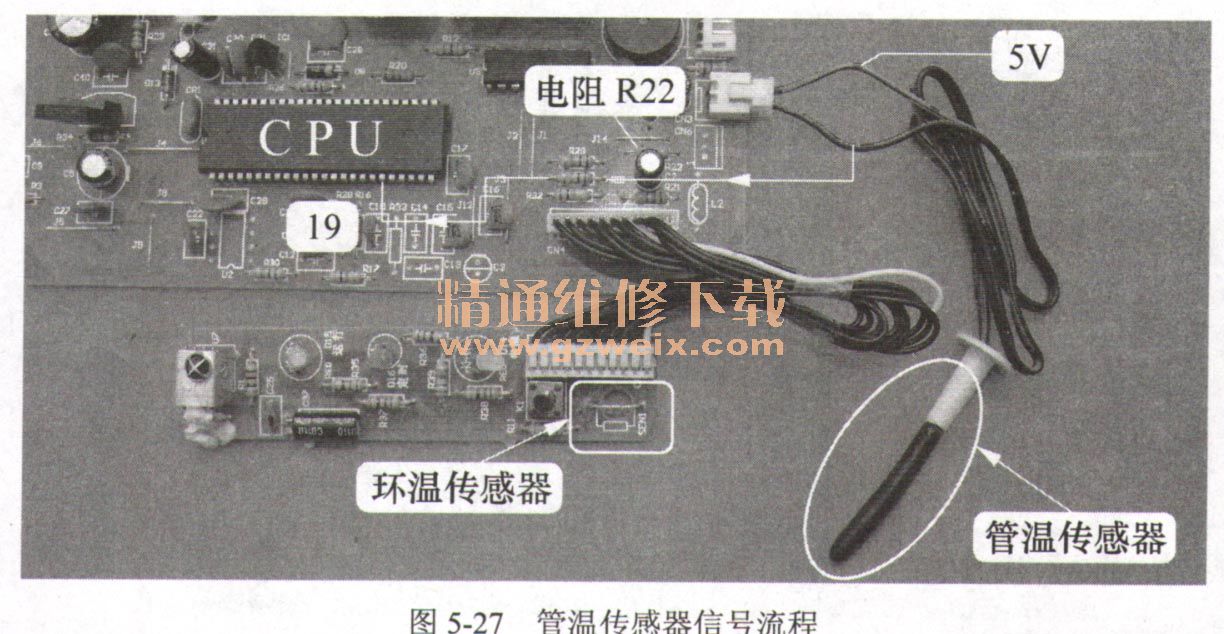
室內(nèi)機CPU的20腳檢測室內(nèi)環(huán)溫傳感器溫度,19腳檢測室內(nèi)管溫傳感器溫度,兩路傳感器工作原理相同,均為傳感器與偏置電阻組成分壓電路,傳感器為負溫度系數(shù)(NTC)的熱敏電阻。以室內(nèi)管溫傳感器電路為例,如蒸發(fā)器溫度由于某種原因升高,室內(nèi)管溫傳感器溫度也相應升高,其阻值變小,根據(jù)分壓電路原理,分壓電阻R22分得的電壓也相應升高,輸送到CPU19腳的電壓升高,CPU根據(jù)電壓值計算得出蒸發(fā)器的實際溫度,并與內(nèi)置的數(shù)據(jù)相比較,對電路進行控制。假如在制熱模式下,計算得出的溫度大于78℃,則控制壓縮機停機,并顯示故障代碼。
該電路的傳感器特性、電路組成與作用、溫度與電壓對應表、常見故障、傳感器檢測方法等相關(guān)知識參見第3章第3節(jié)的第三部分內(nèi)容。
4.過零檢測電路
(1)作用
該電路的作用為CPU提供電源電壓的零點信號,以便CPU在零點附近驅(qū)動光耦可控硅的導通角,通過軟件計算出電源供電是否存在瞬時斷電的故障。本機主板供電使用開關(guān)電源,過零檢測電路的取樣點為交流220V。
說明:如果室內(nèi)機主板使用變壓器降壓型電源電路,則過零檢測電路取樣點為變壓器次級整流電路的輸出端。兩者電路設計思路不同,使用的元器件及檢測點也不相同,但工作原理類似,所起的作用是相同的。
(2)工作原理
圖5-28(a)所示為海信KFR 26GW/11BP過零檢測電路原理圖,圖5-28(b)所示為實物圖。

從電路原理圖可以看出,本機過零檢測電路與海信KFR-2601 GWBP室外機瞬時停電檢測電路基本相同(第4章第3節(jié)的第四部分內(nèi)容),工作原理也基本相同,只是所起的作用不同。
電路主要由電阻R4、光耦PC3等主要元器件組成。交流電源處于正半周即L正、N負時,光耦PC3初級得到供電,內(nèi)部發(fā)光二極管發(fā)光,使得次級光電三極管導通,5V電壓經(jīng)PO次級、電阻R30為CPU⑩腳供電,為高電平5V;交流電源為負半周即L負、N正時,光耦PC3初級無供電,內(nèi)部發(fā)光二極管無電流通過不能發(fā)光,使得次級光電三極管截止,CPU⑩腳經(jīng)電阻R30、R3接地,引腳電壓為低電平0V。
交流電源正半周和負半周極性交替變換,·光耦反復導通、截止,在CPU⑩腳形成100Hz脈沖波形,CPU內(nèi)部電路通過處理,檢測電源電壓的零點及供電是否存在瞬時斷電。
交流電源頻率為每秒50Hz,每1Hz為一周期,一周期由正半周和負半周組成,也就是說CPU⑩腳電壓每秒變化100次,速度變化極快,萬用表顯示值不為跳變電壓而是穩(wěn)定的直流電壓,實測⑩腳電壓為2.2V,光耦PC3初級為0.2V。
(3)常見故障
CPU⑩腳正常時為跳變電壓,常見故障為電阻R4開路、光耦PC3初級發(fā)光二極管開路或內(nèi)部光源傳送不正常,次級一直處于截止狀態(tài),使CPU⑩腳恒為低電平0V,開機后室內(nèi)風機不能運行,整機也不工作,并報“瞬時停電” 或“無過零信號”的故障代碼。
5.霍爾反饋電路
圖5-29(a)所示為海信KFR 26GW/11BP霍爾反饋電路原理圖,圖5-29(b)所示為實物圖。
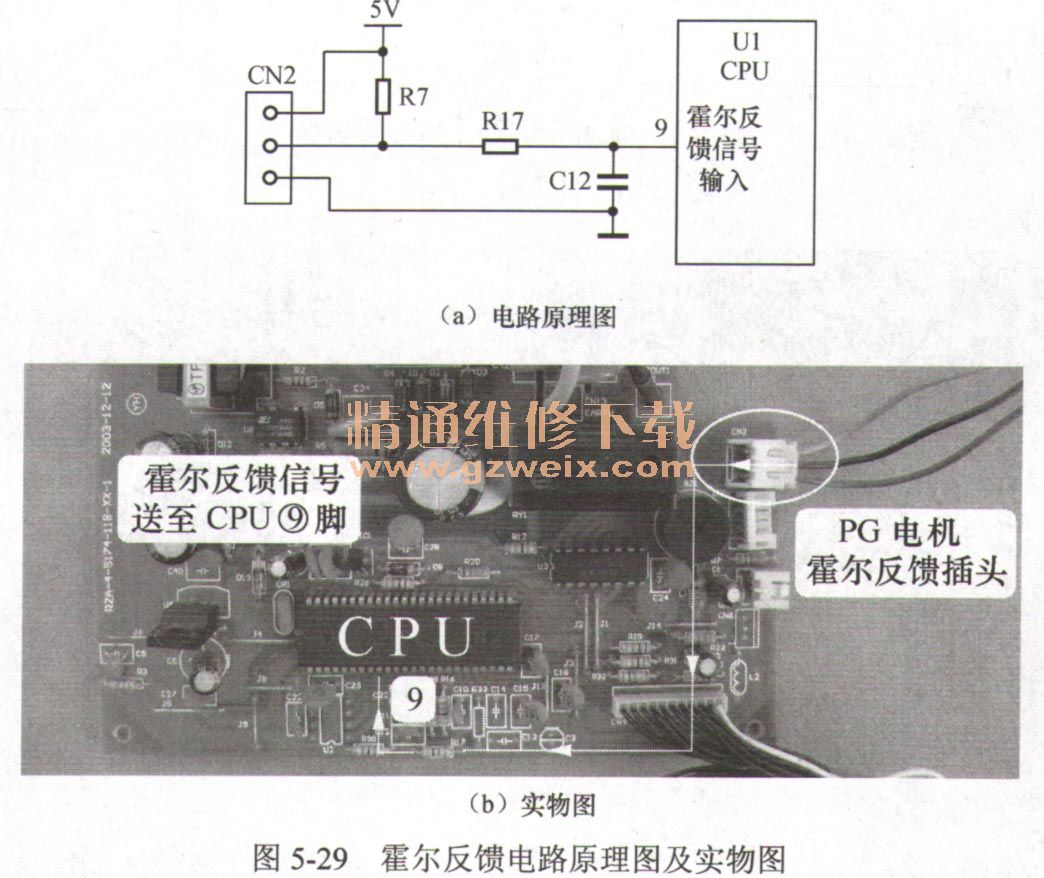
PG電機旋轉(zhuǎn)一圈,內(nèi)部霍爾元件會輸出一個脈沖信號或幾個脈沖信號(廠家不同,脈沖數(shù)量不同),CPU根據(jù)脈沖信號數(shù)量計算出實際轉(zhuǎn)速。
該電路的作用是向CPU提供代表PG電機實際轉(zhuǎn)速的霍爾信號,由PG電機內(nèi)部霍爾反饋元件、電阻R7/R17、電容C12和CPU的⑨腳組成。
PG電機內(nèi)部設有霍爾元件,旋轉(zhuǎn)時輸出端輸出霍爾信號,通過CN2插座、電阻R17提供給CPU⑨腳,CPU內(nèi)部電路計算出實際轉(zhuǎn)速,與目標轉(zhuǎn)速相比較,如有誤差通過改變光耦可控硅導通角,從而改變PG電機工作電壓,使實際轉(zhuǎn)速與目標轉(zhuǎn)速相同。
PG電機停止運行時,根據(jù)內(nèi)部霍爾元件位置不同,霍爾反饋插座的信號引針電壓即CPU⑨腳電壓為5V或0V; PG電機運行時,不論高速還是低速,電壓恒為2.5V,即供電電壓5V的一半。
該電路的常見故障及霍爾元件檢查方法等相關(guān)知識參見第3章第5節(jié)第五部分的內(nèi)容。
上一頁 [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] 下一頁
器單元電路")
器的主要器件")
器的維修工具及操作方法")
器結(jié)構(gòu)原理及基本維修")

